4. Qu’est-ce-que la MicroLabBox ?#
La MicroLabBox est un système tout-en-un de développement temps-réel conçu par dSPACE. Elle est utilisée pour la commande, la simulation et l’expérimentation dans des domaines comme :
l’automobile (commande moteur, traction électrique),
l’aéronautique,
la robotique,
les énergies renouvelables,
l’enseignement/recherche en automatique et systèmes embarqués.
Elle permet de développer, tester et exécuter en temps réel des algorithmes de commande connectés à du matériel physique appelé Hardware In the Loop ou (HIL).
4.1. Caractéristiques principales#
Caractéristique |
Détail |
|---|---|
💻 Processeur temps réel |
Processeur PowerPC ou ARM performant pour exécution rapide des modèles |
⏱ Temps réel |
Exécution en boucle avec des pas d’intégration très courts |
🎛 Interfaces I/O |
Entrées/sorties analogiques, numériques, PWM, encodeurs, CAN, Ethernet, etc. |
🔁 Programmation |
Compatible avec MATLAB/Simulink |
📡 Connexion PC |
Via USB ou Ethernet pour le déploiement et la supervision |
Dans ce projet, toutes les communications avec les équipements interfacés avec la MicroLabBox se font avec un bus CAN.
4.2. À quoi sert-elle ?#
Développement de lois de commande : moteurs, convertisseurs, systèmes mécaniques…
Simulation Hardware-in-the-Loop (HIL) : tester des algorithmes avec des modèles temps réel.
Contrôle en boucle fermée : acquisition de capteurs et génération de commandes (PWM…).
Enseignement : utilisée en écoles d’ingénieurs et universités.
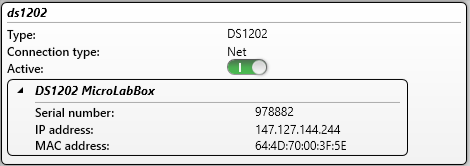
4.4. Informations sur l’équipement N7#
La microlabBox est une version DS 1202 relié au réseau Ethernet. Ces informations d’identifiant sont
4.5. Accès à la page de configuration de la MicroLabBox#
La MicroLabBox est consultable par son lien html sur le réseau N7 via l’adresse http://147.127.134.5/usbManagement.html
4.3. Comment ça marche ?#
Le développement d’un projet temps-réel compilée sur la Microlabbox doit suivre les étapes suivantes:
Modélisation dans Simulink.
Compilation avec Real-Time Interface (RTI).
Téléchargement dans la MicroLabBox.
Exécution temps réel du code.
Supervision avec ControlDesk : visualisation et interaction en direct.
Pour se familiariser avec les étapes de création d’un projet HIL piloté par la Microlabbox, suivre l’exemple pas à pas du chapitre Premiers pas avec le HIL