3. Equipements physiques du projet#
3.1. Illustration du système#
L’équipement de propulsion électrique utilisé dans ce projet s’apparente aux puissances d’un véhicule de type Citroën AMI (~7 kW).
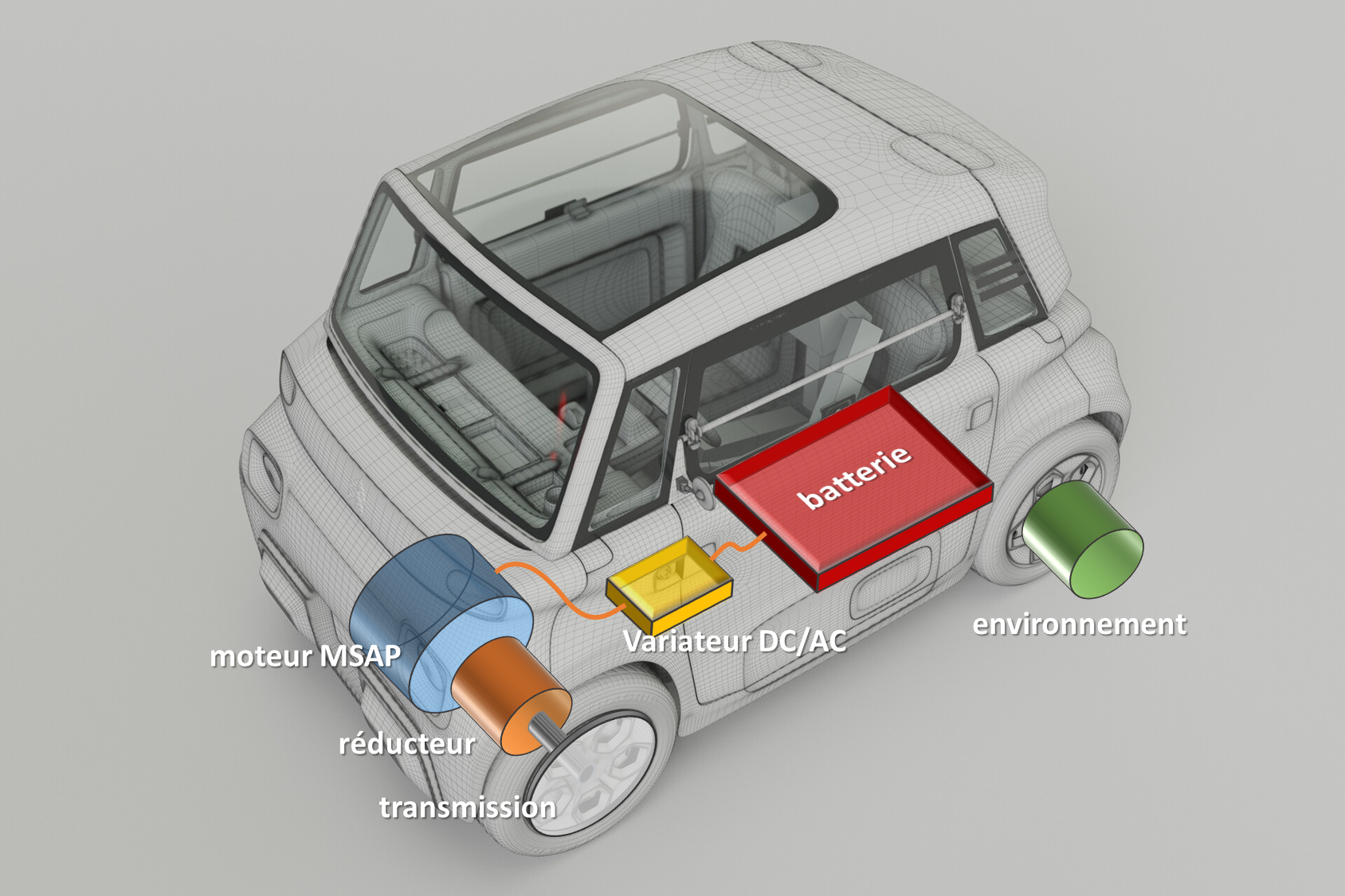
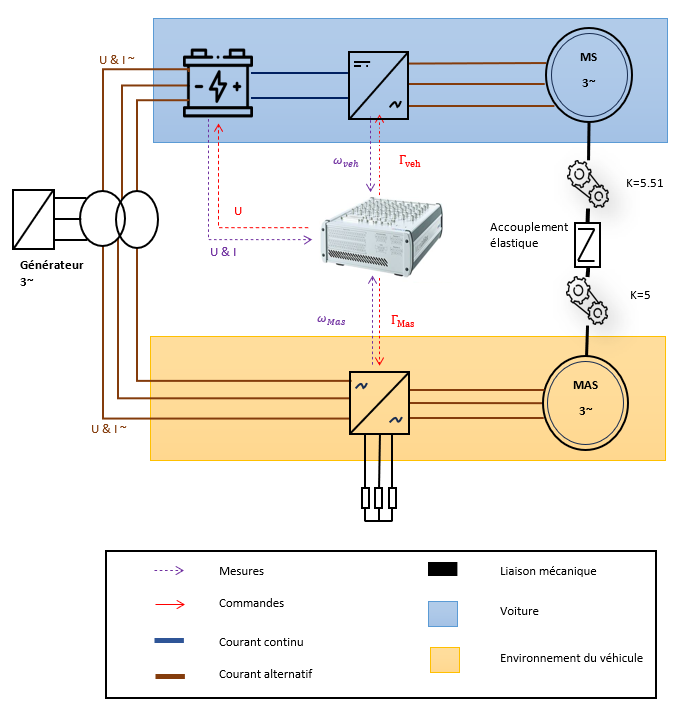
Réduit à une chaîne de propulsion, celle-ci prend la forme du banc expérimental schématisé ci-dessous:
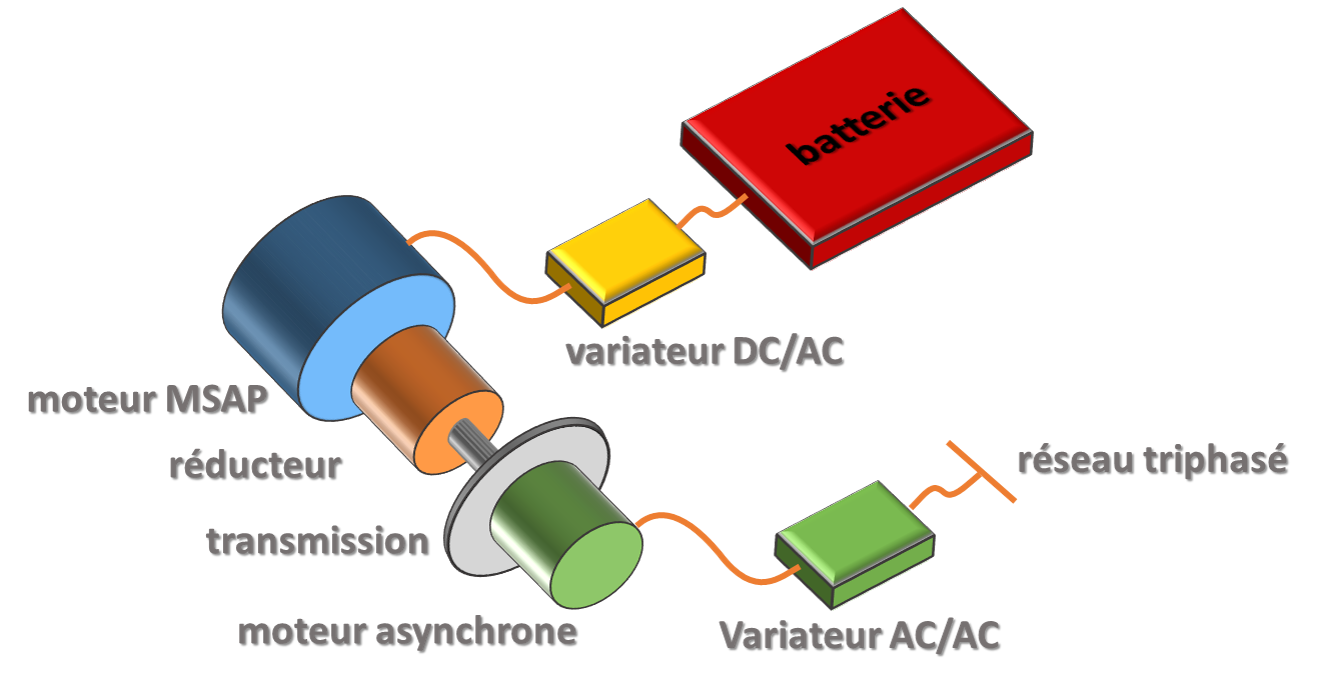
La figure précédente montre la simplification proposée sur le banc moteur au regard du véhicule électrique réel :
Un moteur synchrone à aimant permanent Benevelli : fonctionne comme moteur électrique de notre véhicule simulé.
Un moteur asynchrone : permet d’implémenter différents profils et comportements de route et de les traduire comme couple résistant sur l’arbre moteur (efforts de frottement, inclinaison de route, etc.).
Un variateur DC/AC embarqué (SEVCON) : pour gérer l’alimentation et le contrôle du moteur synchrone à aimant permanent Benevelli.
Un convertisseur AC/AC (Nidec M700) : pour l’alimentation et le contrôle du moteur asynchrone.
Une alimentation continue réversible AE PSB 9000 : permet de simuler le comportement de la batterie embarquée.
3.2. Equipements du Banc moteur HIL#
Les éléments constituant le banc de roulage et leurs caractéristiques sont listés dans le tableau suivant :
| Technologie | Pn (KW) | Un (V) | In (A) | N (tr/min) | Cn (N.m) | Nombre de paires de pôles | Prix HT (€) | |
|---|---|---|---|---|---|---|---|---|
 |
Moteur Synchrone triphasé à aimants permanents (SMAC 200-052-28) | 7,5 | 48 | 160 | 3000 | 24 | 4 | 1 860,00 |
 |
Moteur Asynchrone triphasé à cage d’écureuil (LSES 132 SM) | 5,5 | 230/400 | 11 | 1462 | 35,9 | 2 | 3 172,38 |
| Technologie | K | Cs_max (Nm) | N max (tr/min) | rendement (%) | Prix HT (€) | |
|---|---|---|---|---|---|---|
 |
Support banc pour motoréducteur TX2 | 5 | 1000 | 7200 | 95 | 730 |
|
|
Moteur réducteur Leroy Somer CB3233 SS B3 | 5,51 | - | - | - | 3172 |

| Technologie | Modèle | Un (V) | In(A) | Fn MLI | I max(A) | T° ambiante (°C) | Pn (Kw) | Prix HT (€) | |
|---|---|---|---|---|---|---|---|---|---|
 |
Onduleur triphasé | SEVCON GEN4 | 36 / 48 | 180 | - | 400 (transient) | - | - | - |
 |
Variateur Nidec | Unidrive M700-044-00150 | 380-480 | 15 | - | 18.5 | - | 5.5/7.5 | 2360 |
 |
Spécifications | |
|---|---|---|
| Processeur temps réel |
NXP (Freescale) QorlQ P5020, dual-core, 2 GHz 32 KB L1 data cache per core, 32 KB L1 instruction cache per core, 512 KB L2 cache per core, 2 MB L3 cache total |
|
| Co-processeur chargé de la communication | NXP (Freescale) QorlQ P1011 800 MHz for communication with host PC | |
| Interfaces | Interface hote | Interface Gigabit Ethernet intégrée |
| Interface Ethernet d’E/S temps réel | Interface E/S Gigabit Ethernet intégrée à faible latence | |
| Interface USB | Interface USB 2.0 pour l'enregistrement de données et le démarrage d'applications via un périphérique de stockage de masse USB (max. 32 Go pris en charge) | |
| Interface CAN | Canaux CAN (réseau partiel pris en charge) | |
| Interface série | 2 x interface UART (RS232/422/485) | |
| Interface LVDS | 1 x interface LVDS pour se connecter à l'interface générique programmable PGI1 | |
| Mémoire |
1GB de DRAM 128 MB de memoire flash |
|
| FPGA programmable | Xilinx® Kintex®-7 XC7K325T FPGA | |
| Caractéristiques physiques | Température | 0 ... 50 °C (température ambiante) |
| Alimentation | 100 ... 240 V AC, 50 ... 60 Hz | |
| Consommation électrique | 125W | |
| Dimensions | Approx. 310 x 250 x 115 mm (12.2 x 9.8 x 4.5 in) | |
| Prix (€) | ACE_MLBX 1302T_DE | 9900 |
| RTICANMM_BS USB | 1020 | |
| CAN_OPEN_BS USB | 2827 | |
3.3. Organisation du banc expérimental#
3.3.1. Liaison bus CAN#
L’ensemble des appareils sont configurables et pilotables à partir d’une liaison par bus CAN. Tous les équipements communicants sont reliés par un même bus, chacun possédant un numéro d’identification unique (ID number).
La configuration initiale du réseau CAN attribue les ID number suivant pour les différents équipements.
| Equipement | ID number (décimal) | ID number (hexadécimal) | ID number (binaire) | bit rate | Commentaires |
|---|---|---|---|---|---|
| Alimentation DC PSBE9000 | 02 | 02 | 0010 | 250kb/s | ID number peut être vérifié et paramétré à partir du menu accessible par l'écran en facade de l'alimentation. Menu/Communication/ ID Address |
| Variateur NIDEC M700 | 10 | 0xA | 1010 | 250kb/s | ID number peut être vérifié et paramétré à partir de l'application PC Nidec Connect. La configuration du variateur se fait par liaison Ethernet. Menu/Communication/ ID Address |
| Variateur SEVCON GEN4 | 03 | 03 | 0011 | 250kb/s | ID number peut être vérifié et paramétré à partir de l'application PC BorgWarner DVT Customer. La liaison se fait à partir du bus CAN et du boitier IXXAT USB-to-CAN. Note: Les autres applications utilisant le boitier IXXAT doivent être fermées. |
3.3.2. Liaison physique BUS CAN#
Dans les configurations où plusieurs équipements sont reliés au bus CAN (multiples noeuds), et pour accéder au high-speed-baud rate, il est indispensable d’ajouter à chaque extrémité du bus une résistance de 120 Ohm. Cela permet d’éviter la réflexion des messages et de charger suffisamment la liaison électrique.
A titre d’illustration, le schéma de liaison ci-dessous est proposé.
