8. Glossaire#
8.1. -A-#
8.2. -B-#
8.2.1. Big-endian#
reading from left to right

8.3. -C-#
8.3.1. CAN#
Controller Area Network
8.3.2. COB-ID#
Communication Object Identifier Chaque trame CANopen commence par un COB-ID faisant office d’identifiant de cette trame. Au cours de la phase de configuration, chacun des nœuds reçoit le COB-ID de la (ou les) trame(s) dont il est le récepteur ou l’émetteur. Termes associés: CANopen
8.4. -D-#
8.4.1. DBC - DataBase CAN#
Un fichier DBC (Database CAN) est un fichier de description de réseau CAN utilisé pour :
Traduire les trames CAN (messages bruts) en signaux lisibles (température, vitesse, état d’un capteur, etc.)
Décrire la structure des messages : ID, longueur, signaux, unités, décalages, etc.
Permettre aux outils (ex: CANalyzer, CANoe, Python + cantools…) de comprendre les trames CAN
Le fichier DBC peut être utilisé pour représenter les messages CANopen (par exemple, PDOs).
Mais pour une définition plus précise d’un nœud CANopen, on utilise généralement un fichier EDS (Electronic Data Sheet) ou ODX.
Termes associés: CANopen
8.4.2. DC - Data Compression#
Data Compression ou 16-bit Data Alignment
8.4.3. DCF - Device Configuration File#
Le fichier de configuration de l’appareil (DCF) est une version spécifique de la fiche technique électronique (EDS) de l’appareil. Dans un réseau CANopen, il est courant d’avoir plusieurs appareils avec la même EDS. Dans le cadre de la configuration du réseau CANopen, chacun de ces dispositifs CANopen se voit attribuer un ID de nœud spécifique (et donc des ID CAN uniques pour la communication) et un débit binaire spécifique. Ces informations sont nécessaires pour traduire l’EDS « à usage général » en un DCF prêt à être installé. En outre, le DCF peut également ajouter des valeurs spécifiques pour d’autres objets de l’EDS.
Par exemple, un bus CANopen peut avoir cinq modules IO connectés au même bus CAN, tous partageant le même EDS. Pour permettre la communication, les appareils doivent recevoir des ID de nœud uniques (afin d’éviter les collisions d’ID) et leurs débits binaires doivent être réglés pour correspondre au bus CAN dans lequel ils sont intégrés.
Parmi les autres objets souvent personnalisés via le DCF figurent le mappage de la charge utile PDO, les COB-ID et les réglages spécifiques au fabricant concernant, par exemple, les paramètres d’étalonnage ou les limites.
8.4.4. DP - Device Profile#
Le Device Profile fait partie du dictionnaire des objets (OD).
8.5. -E-#
8.5.1. EDS - Electronic Data Sheet#
La fiche technique électronique CANopen (EDS) est un format de fichier texte normalisé défini dans le document CiA 306-1. Elle sert de modèle numérique pour le dictionnaire d’objets (OD) d’un appareil CANopen, spécifiant les objets pris en charge par l’appareil.
En particulier, l’EDS comprend les informations suivantes :
Objets spécifiques à la communication selon CiA 301
Objets spécifiques à l’appareil/interface selon le profil de l’appareil
Objets spécifiques au fabricant
L’EDS CANopen sert essentiellement de description électronique d’un appareil spécifique d’un fournisseur spécifique. L’EDS peut être chargé par les outils logiciels/API CANopen pour aider à configurer les appareils, gérer les réseaux et interpréter le trafic CANopen brut.
L’EDS est normalement fourni par le vendeur de l’appareil afin de faciliter l’intégration de l’appareil dans un réseau plus vaste.
Termes associés: CANopen
8.6. -F-#
8.7. -G-#
8.8. -H-#
8.9. -I-#
8.10. -J-#
8.11. -K-#
8.12. -L-#
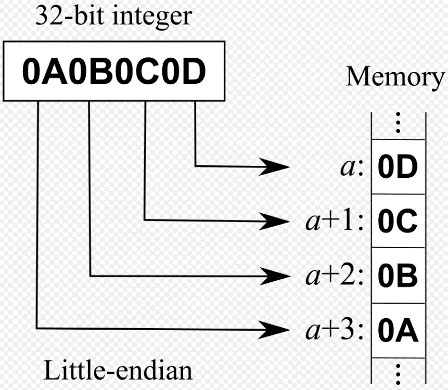
8.12.1. Little-endian#
reading from right to left
8.13. -M-#
8.14. -N-#
8.14.1. NMT#
Network Management Objects Termes associés: CANopen
8.15. -O-#
8.15.1. OD - Object Dictionary#
Le dictionnaire d’objets (OD) est une collection de tous les éléments de données qui ont une influence sur le comportement des objets d’application, des objets de communication et de la machine d’état utilisée sur cet appareil. Il sert d’interface entre la communication et l’application.
Le OD est essentiellement un regroupement d’objets accessibles via le réseau dans un ordre prédéfini. Chaque objet du dictionnaire d’objets est adressé à l’aide d’un index de 16 bits et d’un sous-index de 8 bits.
Un SDO (Service Data Object) fournit un accès direct aux entrées d’objets du dictionnaire d’objets d’un dispositif CANopen. Ces entrées d’objets peuvent contenir des données de taille et de type arbitraires. Les SDO peuvent être utilisés pour transférer plusieurs ensembles de données (chacun contenant un grand bloc de données arbitraire) d’un client à un serveur et vice versa. Le client contrôle via un multiplexeur (index et sous-index du dictionnaire d’objets) quel ensemble de données doit être transféré. Le contenu de l’ensemble de données est défini dans le dictionnaire d’objets.
Un PDO (Process Data Object) fournit un transfert de données en temps réel des entrées d’objets du dictionnaire d’objets d’un dispositif CANopen. Le transfert de PDO s’effectue sans surcharge de protocole. Les PDO correspondent aux objets du dictionnaire d’objets et fournissent l’interface avec les objets de l’application. Le type de données et le mappage des objets d’application dans un PDO sont déterminés par une structure de mappage PDO correspondante dans le dictionnaire d’objets.
Termes associés: CANopen
8.15.2. OSI Model#
Open Systems Interconnection (OSI) mode
OSI est un modèle de référence développé par l’Organisation internationale de normalisation (ISO) qui « fournit une base commune pour la coordination de l’élaboration des normes aux fins de l’interconnexion des systèmes ».
8.16. -P-#
8.16.1. PDO - Process Data Object#
Un PDO (Process Data Object) fournit un transfert de données en temps réel des entrées d’objets du dictionnaire d’objets (OD) d’un dispositif CANopen. Le transfert de PDO s’effectue sans surcharge de protocole. Les PDO correspondent aux objets du dictionnaire d’objets et fournissent l’interface avec les objets de l’application. Le type de données et le mappage des objets d’application dans un PDO sont déterminés par une structure de mappage PDO correspondante dans le dictionnaire d’objets. Termes associés:
8.17. -Q-#
8.18. -R-#
8.18.1. RxPDO#
Receive Process Data Object
8.19. -S-#
8.19.1. SDO - Service Data Object#
Un SDO (Service Data Object) fournit un accès direct aux entrées d’objets du dictionnaire d’objets (OD) d’un dispositif CANopen.
Ces entrées d’objets peuvent contenir des données de taille et de type arbitraires. Les SDO peuvent être utilisés pour transférer plusieurs ensembles de données (chacun contenant un grand bloc de données arbitraire) d’un client à un serveur et vice versa. Le client contrôle via un multiplexeur (index et sous-index du dictionnaire d’objets) quel ensemble de données doit être transféré. Le contenu de l’ensemble de données est défini dans le dictionnaire d’objets.
Termes associés: CANopen
8.20. -T-#
8.20.1. TxPDO#
Transmit Process Data Object