6. Premiers pas avec la Microlabbox#
Ce guide a pour but d’initier au pilotage d’un équipement physique à l’aide de la Microlabbbox. Ces étapes doivent être scrupuleusement suivies. En cas de mauvaise manipulation, un danger pour le matériel et les personnes est possible.
Exécuter ce tutoriel uniquement avec l’autorisation et sous la supervision de votre encadrant.
7. Objectif du tutoriel#
Ce tutoriel va permettre de se familiariser “pas à pas” avec les différentes étapes d’un projet HIL. L’objectif est le pilotage de l’alimentation DC réversible (PSB E9000) à l’aide de la Microlabbox par protocole de communication CANopen.
Les étapes successives abordées sont:
Modélisation dans Simulink.
Compilation avec Real-Time Interface (RTI).
Téléchargement dans la MicroLabBox.
Exécution temps réel du code.
Supervision avec ControlDesk : visualisation et interaction en direct.
Avant de débuter ce tutoriel, l’utilisateur s’est assuré que :
Matlab dispose des modules RTI nécessaires
la Microlabbox est correctement connectée au réseau Ethernet et sous tension
l’alimentation DC (PSB E9000) est alimentée en triphasée et sous tension
l’alimentation DC est reliée à la Microlabbox par bus CAN (en respectant les impédances de terminaison 120 \(\Omega\) du bus)
Par précaution, aucune charge électrique ne sera reliée à la sortie de l’alimentation DC.
7.1. Modélisation dans Simulink#
7.1.1. Vérification de la configuration minimale du contrôleur#
La MicroLabBox de dSPACE permet de contrôler un réseau CAN via le protocole CANOpen. Pour cela, deux toolboxes sont nécessaires :
dSPACE CANOpen Master Blockset
dSPACE RTI CAN MultiMessage Blockset
Via le RTICANMM ControllerSetup, le connecteur CAN de la MicroLabBox peut être configuré ou non avec une résistance de terminaison de 120 Ohm. Si oui, l’équipement peut être en bout du réseau CAN.
Pour générer et configurer le connecteur CANOpen de la MicroLabBox, il faut tout d’abord s’assurer de la présence du RTI data adapté à celle-ci : DS1202. Ce bloc est créé automatiquement quand un nouveau modèle RTI1202 est généré.
Créer un dossier racine dans lequel tous les fichiers seront créés (ex:
Work(D:)\projet_initiation_microlabbox\)Lancer matlab puis Simulink
Modifier le dossier de travail (
D:\projet_initiation_microlabbox)
7.1.2. Création d’un nouveau projet#
Faire
New->Project->Blank projectRentrer le nom du projet (ex: Project name:
TUTO_projet_Simulink), le chemin d’accès puis cliquer sur Create.Lancer Simulink (à l’aide du menu HOME->Simulink ou en tapant
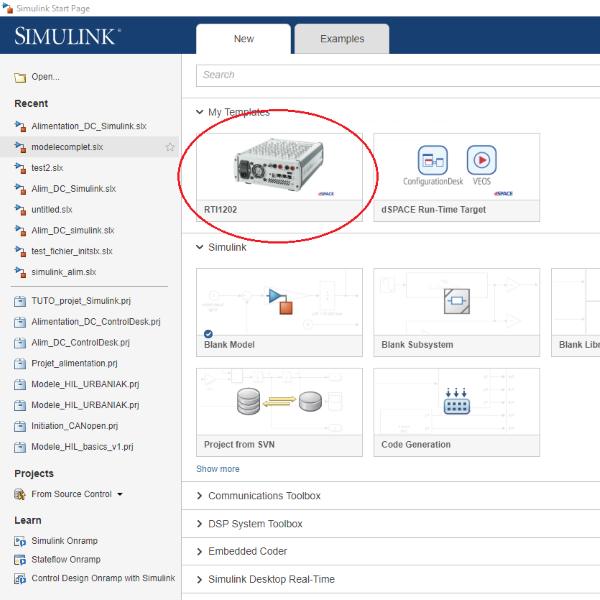
simulinkdans la fenêtre Command Window puis Entrée)Sélectionner le template RTI1202
Template RTI1202
A la création du projet, seul le bloc RTI Data apparaît.

Ce bloc est utilisé par RTI pour stocker des données internes dépendantes du modèle. Veuillez conserver ce bloc au niveau de la racine du modèle (ne pas mettre dans un sous-bloc). La suppression de ce bloc entraînera une perte de données.
Ne jamais supprimer ce bloc ou le copier dans un autre projet!
Vérifier les paramètres de simulation (Ctrl+E). Dans le menu Code Generation, vérifier que
rti1202.tlcapparaît dans le champSystem target fileEnregistrer le modèle simulink dans le dossier créé (ex:
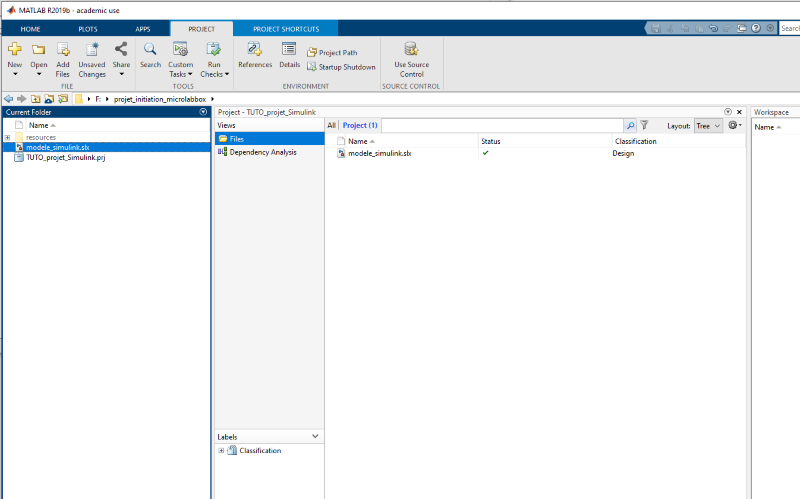
D:\projet_initiation_microlabbox)Le modèle simulink vierge est créé mais doit être ajouté au projet. Pour cela il suffit de faire un Drag & Drop du fichier simulink dans la fenêtre project comme illustré ci-dessous.
Drag & drop Simulink
Pour tout fichier matlab nécessaire au projet, penser à associer les fichiers .m au projet en procédant comme précédemment.
7.1.3. Ajouter et configurer les toolbox#
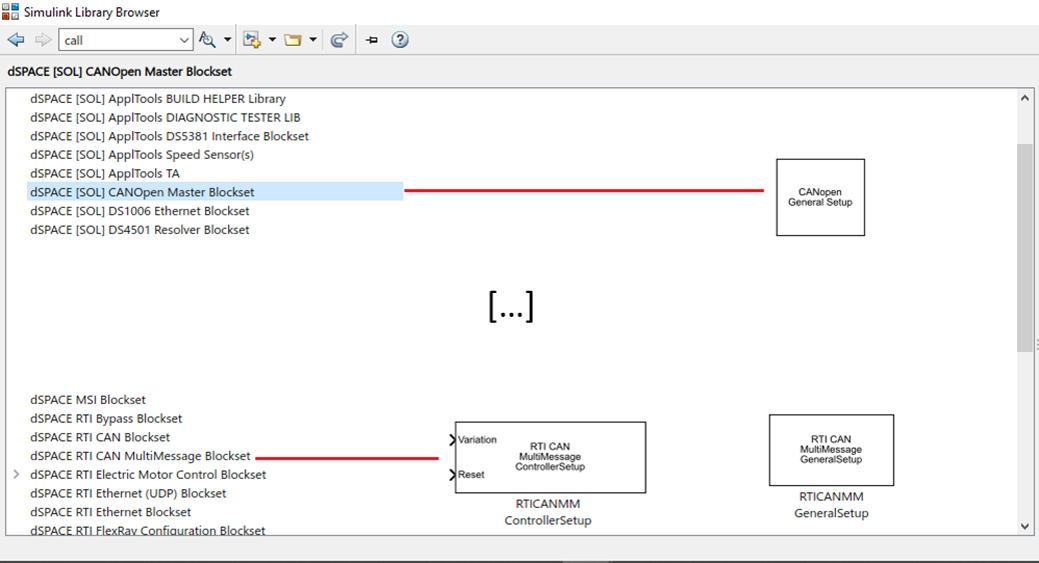
Ajouter les blocs simulink nécessaires à la communication CANopen. Ouvrir Library Browser du menu SIMULATION de Simulink et ajouter les blocs de la librairie Dspace suivants:
CANOpen Master Blockset ->CANopen Setup
RTI CAN MultiMessage Blockset -> RTICANMM Controller Setup
RTI CAN MultiMessage Blockset -> RTICANMM General Setup
Library Browser
7.1.3.1. Bloc RTI CAN MultiMessage Setup#
Double cliquer sur le bloc RTI CAN MultiMessage Setup - General Setup, pour obtenir la fenêtre suivante:
RTI CAN MultiMessage Setup
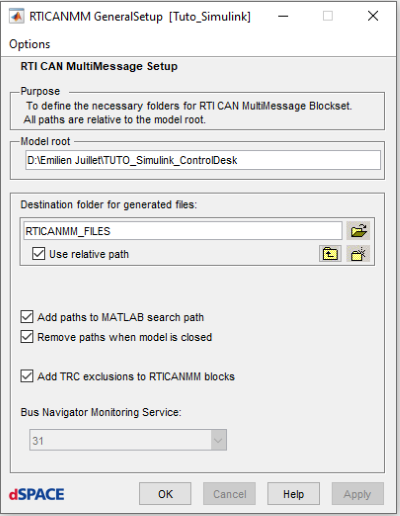
Ce bloc permet de définir le dossier dans lequel l’ensemble des fichiers générés seront enregistrés. Par défaut, le dossier est nommé RTICANMM_FILES. Vérifier que le Model root s’adresse correctement au dossier de votre projet. Puis OK.
7.1.3.2. Bloc RTI CAN ControllerSetup#
Double cliquer sur le bloc RTI CAN ControllerSetup, pour obtenir la fenêtre suivante:
RTIcan Controller Setup

Ce bloc permet de configurer un contrôleur CAN en définissant les paramètres de communication du bus CAN pour que le reste du modèle Simulink puisse envoyer et recevoir des messages CAN en temps réel.
Régler la vitesse de communication à
250 Kb/spuis Apply.
7.1.4. Création d’un noeud#
Le troisième bloc permet de créer les différents noeuds (équipements reliés au bus CAN).
Le bloc CANopen Setup sert à :
Initialiser la couche CANopen sur le matériel dSPACE
Définir les paramètres de base du réseau CANopen
Permettre l’utilisation des blocs CANopen dans le modèle
Dans ce tutoriel, un seul noeud est requis (l’alimentation DC PSBE 9000).
Double cliquer sur le bloc CANopen Setup, pour obtenir la fenêtre suivante:
bloc CANopen Setup
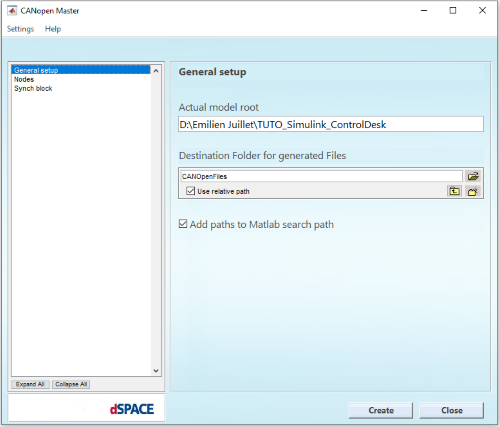
Cette fenêtre comporte 3 menus dans la colonne de gauche:
General Setup
Nodes
Synch block
Sélectionner Nodes. Indiquer le numéro du noeud de l’équipement à définir.
Le numéro ID des équipements est directement configuré sur les appareils. L’alimentation DC PSBE 9000 est déclarée comme étant le noeud 2. Pour vérifier la configuration de l’alimentation, suivre les consignes configuration ID de l’alimentation.
Dans Select nodes, indiquer 2 puis add to model. Node 2 apparaît dans la colonne de gauche.
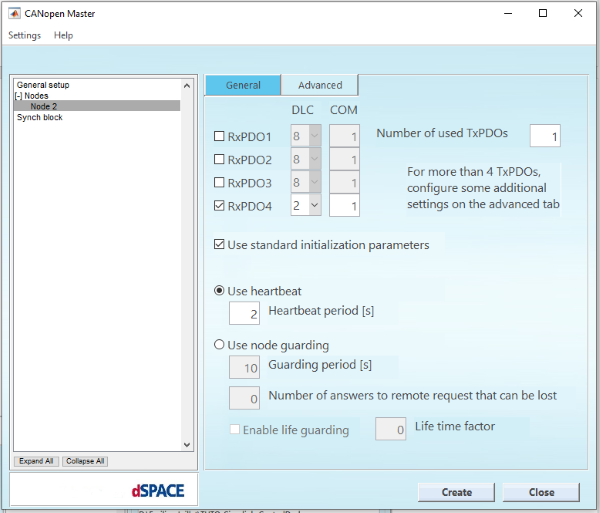
14. Cliquer sur le noeud créé.
Les menus General et Advanced apparaissent.
Le menu général permet de configurer:
Le numéro du nœud
Le nombre de RxPDO souhaité
Le nombre de TxPDO souhaité
Canopen Setup
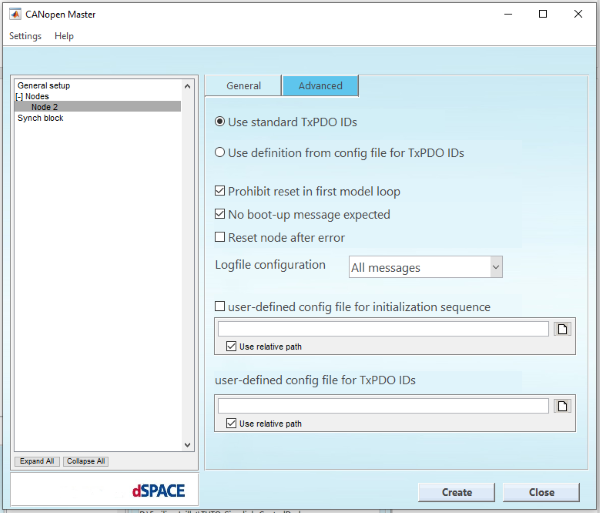
Il est important de sélectionner No boot-up message expected pour l’alimentation DC qui ne génère pas de message de démarrage.
Cliquer sur Synch block et indiquer un Time period for syncrhonization message [s] de
0.5.Cliquer sur le bouton
Create. Le modèle simulink crée un bloc noeud comme illustré ci-dessous.
Bloc noeud Créé
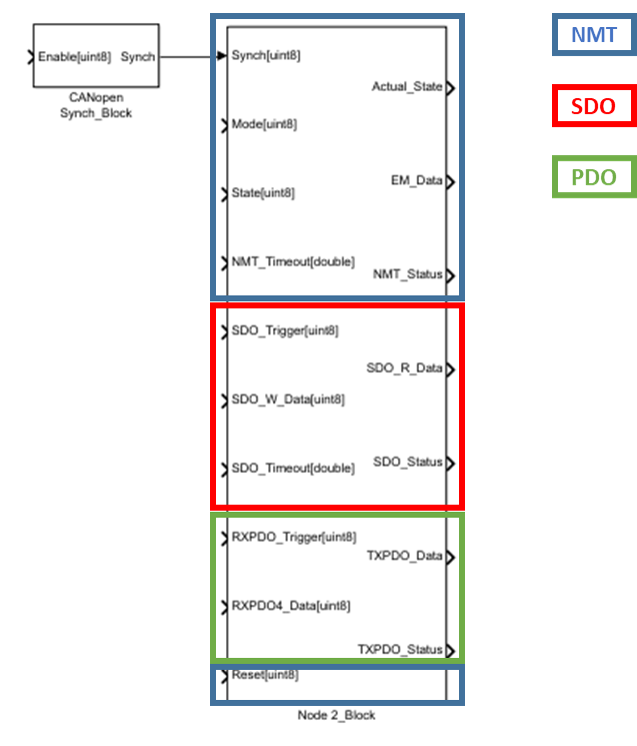
Ce bloc affiche toutes les entrées et les sorties pour intéragir avec le noeud 2 en temps-réel.
Pour connaître la définition des différentes entrées et sorties, voir Définition des E/S node bloc.
A présent que le noeud est créé, il faut compléter ses entrées et sorties pour permettre l’envoi et la réception de messages à l’équipement via le bus CAN. Ces messages, codés en hexadécimal, obéissent à un format standardisé en partie (ex: VendorName ou ProductNumber). D’autres sont modifiables par le fabricant et spécifiques à chaque équipement.
Pour connaître l’ensemble de ces paramètres de réglage et de communication, les équipements communicants possèdent un fichier EDS (Electronic Data Sheet) qui décrit les différents registres de l’équipement, les valeurs associées.
Le fichier EDS de l’alimentation DC est consultable sur le lien suivant Fichier EDS.
Pour faciliter la lecture des fichiers EDS, vous pouvez utiliser le logiciel Vector téléchargeable ici Vector EDS.
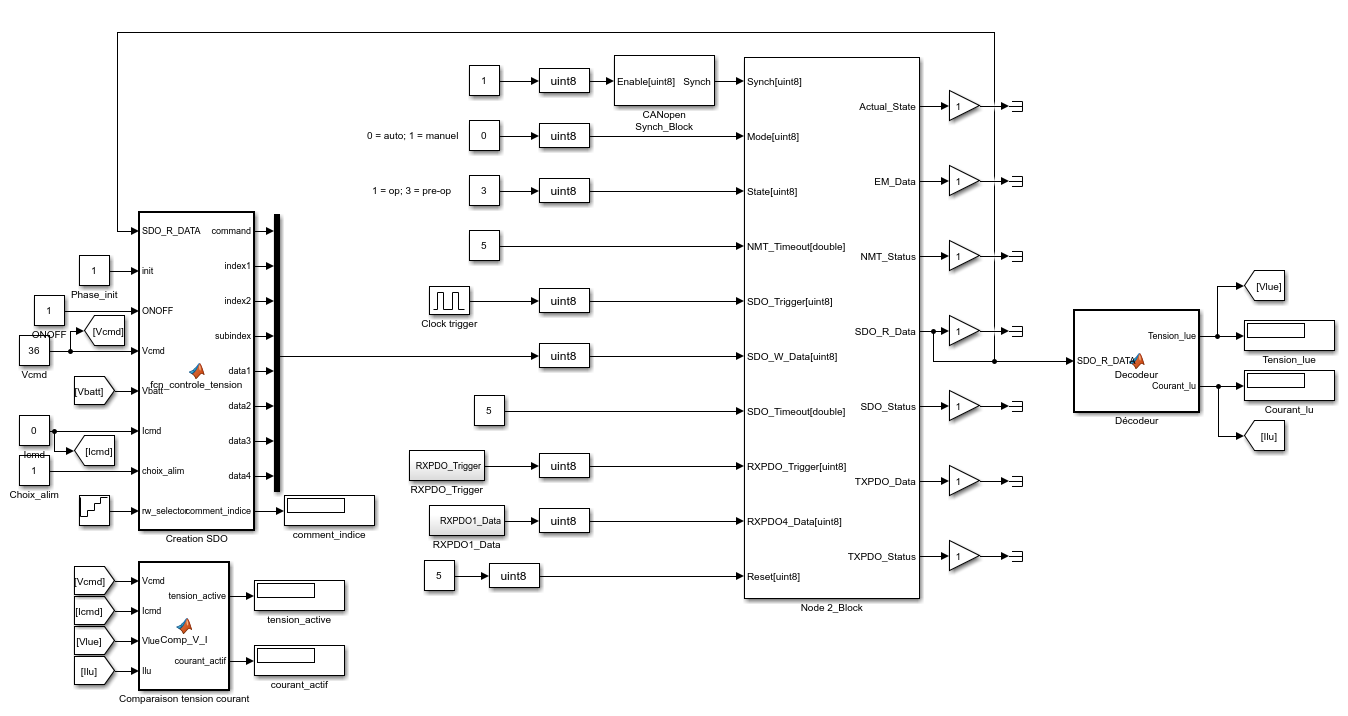
7.2. Exemple de modèle Simulink de contrôle de l’alimentation DC#
Modèle Simulink - Contrôle Alimentation DC